

�����˵Ĵ������ɼ�ϵͳ�ͼܹ���
����ЧӦ��ѹ�����������ڸ�Ӧ������Դ��ѹ��ת������ֱ����·��ѹ��
��һ�λ������ȷ��ת������ڶ��ӵ�λ�ã��Ա�������һ�λ���λ�ü��Ҳ��һ���ؼ�����
�ٶȺ�λ�õĸ�������ڻ����У���Ϊ�������ȷ��ʵ������Ҫ��������ʱ����֪����֪���ص���ǻ�������������ѹ������
��ѹ�������¶ȡ���ѹ�͵����������Լ� GSM ģ�顣���ܼҾӻ����˵Ĵ�����������ѹ���ͣ������ͣ����¶ȣ���������ֵˮƽ�zʱ����ѹ��������ѹ����λ����ʱ�������˵Ĵ�����ͨ��GSMģ������վ����֪ͨ��
![оƬ�з�-���ܼҾ�-�����˵Ĵ�����-������-[Τ����]](/static/upload/image/20211230/1640834051662754.png)
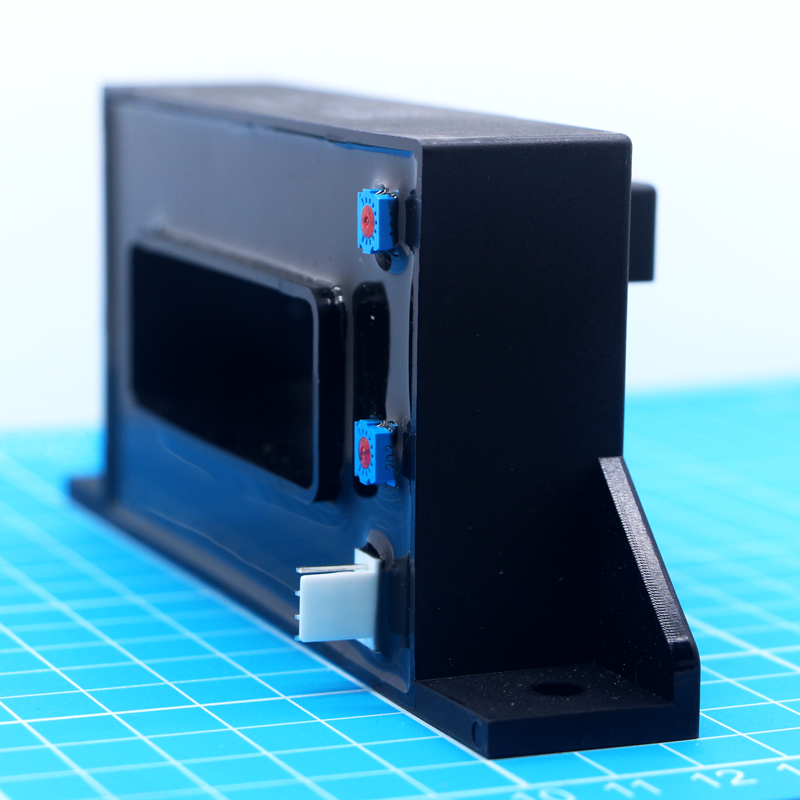
��ѹ������ (EVT) ���������ഫ��������ѹ������Զ������ģ�������˾�Ե��ͺϲ���Ԫ����ѹ����ѹ�������ģ���ź�ͨ��Զ�̵���ģ�L�����ģ��ת��������ת�����ź�ͨ���������䵽�ϲ���Ԫ�����ݷ�ѹ�����Ե���ù����ϲ�����Ե�壬�����ᡣ����һ�βഫ������ѹԭ�����ɷ�Ϊ���ݷ�ѹ�͵����ѹ��
![оƬ�з�-���ܼҾ�-�����˵Ĵ�����-������-[Τ����]](/static/upload/image/20211230/1640834049861764.png)
���а������¡����㣺
��1������������Ĺ��ʺ�
��2�������䵽ԭ�����������κ���ʧ������������ϵͳ�Ħ����ʣ�����������������Ĺ��ʣ����Ը����������ϵ���Ť���ͳ�������ó���������Ϊ����תϵͳ�У����ʵ���Ť�س��ԡ�ѭ��Ƶ�ʣ�



 �ͷ�
�ͷ�